NAMA : FATKHUL ALIM
KELAS : 3 IB 02
NPM : 18411510
1.
Pendahuluan
Seiring
dengan perkembangan ilmu dan teknologi dewasa ini sistem kendali manual maupun
automatik memiliki peran yang sangat penting. Peranan sistem kendali automatik
adalah paling menonjol dalam berbagai keperluan hajat manusia atau bangsa yang
telah maju peradabannya. Contoh konkrit dapat kita temui pada
pengendalian pesawat ruang angkasa, peluru
kendali, sistem pengemudi pesawat, satelit, dan sebagainya.
Sementara di industri diperlukan untuk pengendalian mesin-mesin produksi bidang
manufaktur dan pengendalian proses seperti tekanan, temperatur, aliran,
gesekan, kelembaban, dan sebagainya.
Kemajuan
sistem kendali automatic dalam bentuk teori maupun praktik akan memberikan
kemudahan dalam mendapatkan unjuk kerja sistem dinamik, mempertinggi kualitas,
menurunkan biaya produksi dan penghematan energi. Tingkat kemajuan ini dicapai
tidak secara tiba-tiba, melainkan melalui sejarah perkembangan yang cukup
panjang. Tepatnya adalah sejak ditemukannya governor
sentrifugal sebagai pengendalian kecepatan mesin uap yang dibuat oleh James
Watt pada abad ke-18. Pada tahun 1922, Minorsky membuat alat kendali
automatik untuk pengemudian kapal dan
menunjukkan cara menentukan kestabilan dari persamaan diferensial
yang melukiskan sistem. Pada tahun 1932, Nyquist
mengembangkan suatu prosedur yang relative
sederhana untuk menentukan kestabilan loop tertutup. Pada tahun
1934, Hazen memperkenalkan servomekanik untuk sistem kendali posisi. Pada tahun
1940 hingga 1950 kendali linier berumpan balik dan metode tempat kedudukan akar
dalam desain sistem kendali.
Materi
sistem kendali yang akan disajikan disini penekanannya pada teori klasik, yaitu
sistem satu masukan satu keluaran berumpan balik maupun tanpa umpan balik.
Namun demikian sistem kendali multi masukanmulti keluaran yang melibatkan
peralatan mikroprosesor/ mikrokomputer pun akan disajikan pula dengan porsi
yang relative sedikit. Dengan demikian materi sistem kendali yang disajikan di
sini sebagian besar berfokus pada sistem loop tertutup (closed-loop system).
A. Kendali Loop Tertutup Dan Loop
Terbuka
- Sistem Kendali Loop Tertutup.
Sistem kendali loop tertutup (closed-loop control
system) adalah sitem kendali yang sinyal keluarannya mempunyai pengaruh
langsung terhadap aksi pengendaliannya. Dengan kata lain sistem kendali
loop tertutup adalah sistem kendali berumpan-balik. Sinyal kesalahan
penggerak, yang merupakan selisih antara sinyal masukan dan sinyal umpan-balik
(yang dapat berupa sinyal keluaran atau suatu fungsi sinyal keluaran dan
turunannya), diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat
agar keluaran sistem mendekati harga yang diinginkan. Hal ini berarti
bahwa pemakaian aksi umpan-balik pada loop tertutup bertujuan untuk memperkecil
kesalahan sistem.
Diagram yang menyatakan hubungan antara masukan dan keluaran
dari suatu sistem loop tertutup ditunjukkan pada Gambar 1.
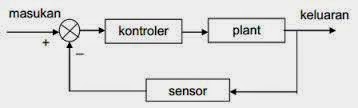
GAMBAR 1.
- · Sistem Kendali Loop Terbuka
Sistem kendali loop terbuka (open loop control system)
adalah sistem kendali yang sinyal keluarannya tidak berpengaruh terhadap aksi
pengendaliannya. Dalam hal ini sinyal keluaran tidak diukur atau diumpanbalikan
untuk dibandingkan dengan sinyal masukannya. Gambar 2 Menunjukkan hubungan
masukan keluaran suatu sistem kendali loop terbuka. Sebuah contoh praktis
adalah mesin cuci (washing machine). Sejak perendaman, pencucian dan pembilasan
pada mesin cuci ini tidak mengukur sinyal keluaran, misalnya kebersihan pakaian
yang dicuci. Contoh lain yaitu pengendalian atau pengaturan lampu lalu-lintas
yang operasinya juga berdasarkan basis waktu. Pada sistem ini tidak
memperhitungkan perubahan arus lalu-lintas yang terjadi pada setiap
persimpangan jalan. Tepatnya adalah kendaraan yang dapat lewat saat lampu hijau
menyala tidak harus sarna dengan banyaknya kendaraan yang masuk atau antri pada
ruas jalan yang bersangkutan, karena dibatasi oleh waktu nyala lampu yang sudah
ditetapkan.

GAMBAR 2.
Jadi pada sistem kendali loop terbuka, keluaran tidak
dibandingkan dengan masukan acuannya. OIeh sebab itu, untuk setiap masukan
acuan terdapat suatu kondisi operasi yang tetap. Perlu diketahui bahwa sistem
kendali loop terbuka harus dikalibrasi dengan hati-hati, agar ketelitian sistem
tetap terjaga dan berfungsi dengan baik. Dengan adanya gangguan (disturbances),
sistem kendali loop terbuka tidak dapat bekerja seperti yang diharapkan.
Kendali loop terbuka dapat digunakan dalam praktek hanya jika hubungan masukan
dan keluaran diketahui dan jika tidak terdapat gangguan internal maupun
gangguan eksternal. Dengan demikian jelas bahwa sistem semaeam ini bukan sistem
kendali berumpan-balik. Demikian pula bahwa setiap sistem kendali yang bekerja
berdasar basis waktu adalah sistem loop terbuka.
SUMBER
Staff UNY. (-). Dasar Sistem
Kendali BAB 1. Dipetik Februari 05, 2014, dari Universitas Negeri
Yogyakarta:
{kind=link}